
Welcome to Boulette's Robotics page!
Welcome
to Boulette's Robotics page!
-------------------------------------------------------------------------------
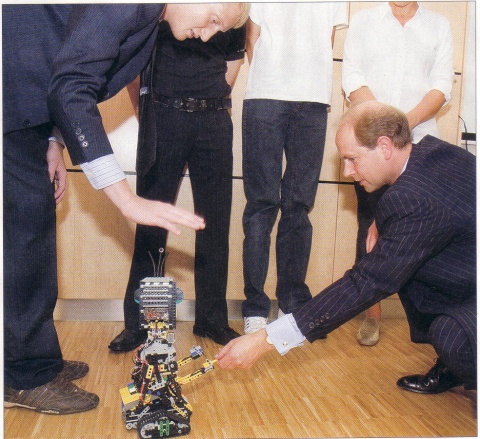
Sept. 11th 2006 : Robot GASTON presented to HRH The Earl of Wessex Prince Edward, the youngest son of the British Queen.
A great honour for Luc Theisen, one of the constructors of GASTON ! For Luc, building the robot with his friends was part of the activities to achieve the Duke of Edinburgh's International Youth Award (Luxembourg Edition). Now Luc had the occasion to present the robot to the Earl of Wessex, who visited Luxembourg for the festivities of the 50th anniversary of the Award. (Scan from "d'Wort", Luxembourg newspaper, Sept 12th 2006)

This school-year we continue our Robotics-project with the Lego Mindstorms Robotics Invention System 1.5 / 2.0. We thank our ministry and the association of the former students of our institution for their generous and continuous support.
:-) We get many funny replies concerning the name of our institution: "Convict Episcopal de Luxembourg". Anglo-Saxons often are being horrified about it : No, "Convict" hasn't the same meaning in French than in English. It roughly means "living together" and it is etymologically derived from the Latin "convivere". The institution is a catholic boarding institute for 12 to 18 year-old boys. The student's nickname for the institute is "Boulette", that can be translated as "Meat loaf". We suppose that the word first has appeared around 1890. Batty Weber, a local author, uses it in his story "Fenn Kass" that he published in 1913.
|
|||
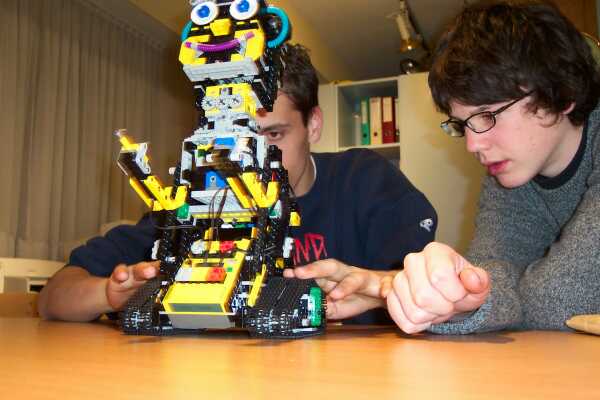
| See two of the B.I.T.-group at work with GASTON, their best project. (What's B.I.T.? Of course: "Boulette's Institute for Technology"; that's the usurpation done by the students :) To explain "Boulette", this is much more complicated... you need to understand French, and read parts of the institute's history.
|
|
||
Most of our programs are created with ROBOLAB which is based on the graphical programming language National Instruments LABVIEW
Our most recent electronic circuit layouts and PC-boards have been prepared with EAGLE 4.01 from CADSOFT
The LEGO-Dacta material may be found at Technik-LPE
Some sophisticated parts are available at
All the CAD-drawings have been realized with LEOCAD |
|||
![]()
| Contact the web-master |