Multi-robot communication
created 16/05/02 - updates
21/05/02 | 03/06/02
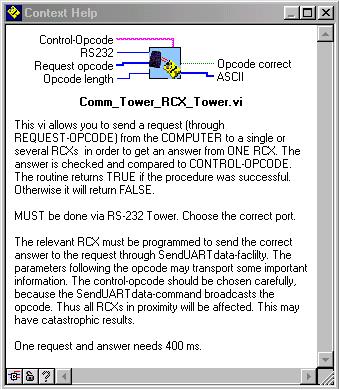
There is one special point that the RCX-software
designers should add to a further firmware-release. This is to allow a reliable
network-protocol for multi-robot applications. Networking exists for the
open-source replacement firmware legOS, but not for lejOS.
We have already dealt with broadcasting,
which means to send information to several RCXs avoiding any computer reaction
to possible RCX-replies. Broadcasting is a one-way data-transfer, with no or
only limited possibility to check whether the correct message has actually been
received. We now propose a bi-directional data-transmission.
This is not evident at all. So there must be some
explanations and restrictions.
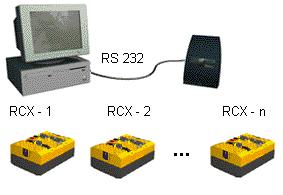
First of all the case we are studying here is the
communication between the COMPUTER and one single RCX-n, all the others being
active. As we will see later there are some side-effects which affect all the
RCXs involved. But we want the computer and the specifyied RCX to exchange data
without disturbing the work of the other RCXs.
For example, suppose there are two RCX
playing soccer and the computer surveying the match via camera. The computer
should download positioning data to the RCXs and they should upload some
sensor-readings.
If you try this through normal
infrared-communication, you'll get plenty of error-messages and garbage-data.
The major problem comes from the master-slave communication system as we already
explained earlier.
To solve the challenge, the principle idea is to
sacrifice two global variables (we propose 21, 22 - remember that in Robolab
variables 23-29 are used during datalogging and variable 31 during some of the
remote-fill operations:
- send PING (opcode 0x10) to wake up the tower and reset
the toggle-bit inside of the
RCXs. (to learn more about opcodes chose http://mindstorms.lego.com/sdk2/default.asp)
- send immediate command SETVAR 21, 2, n (n =
RCX ID-number) (opcode 0x14); this command could be extended with some
additional code (bit-orientated messages
to send more commands in one package, example RCX-7 turn on motor-A would
give something like SETVAR 21, 2, b'0000 0000 0001 0111' , the first three
bits being reserved for the RCX ID-number -in this case b'111'=dec'7'. You can
set-up your own command-codes.) Note: the
computer-program must not toggle the third bit, so we use the Msg_to_string.vi
explained at the Broadcast-page.
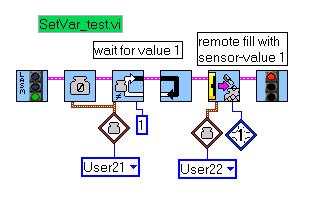
- the RCX should have been previously programmed to react
on changes in variable 21. For instance a special event could be generated
when the correct ID-number has been received. The RCX checks in the firmware
whether the opcode is complete and correct. The opcode is not executed if an
error occured during transmission.
- After reception, the RCX sends
a special reply in function of the received opcode. This reply is normally
verified by the computer. If anything went wrong at this moment, the
computer retries the transmission a certain number of times. If the number
of retries exceeds a certain threshold, an error-message is generated
and the computer-program is paused. (One could intervene at
this place directly in the Robolab software and change parts of the original
code, but this is not the subject here, since we want to do the job for
didactical reasons to teach serial communications and NOT for hacking
reasons.) We try to ignore the retries and error-code
generating through the low-level custom computer-program. Important note: As
several RCXs are involved, all of them will send a reply causing useless
IR-garbage.
- If all is right until now, RCX-n could execute
some additional code, for example upload the current value of sensor_1 or do
anything else. Upload could be done through activating the
SendUARTdata-opcode (0xC2) for SETVAR 22, 9, 0 (remote fill variable 22 with
sensor-value of sensor_1). RCX-n now would broadcast-send this data to all
the involved RCXs AND the activated tower. Don't forget that the tower will
pass to sleep mode after a while, so the upload should be executed when the
tower is still alive. (By the way, Robolab 2.5 encodes the
SETVAR to opcode 0x05, which is the new allround SET command.)
- The special computer-program will now verify the
received bytes. If all of them and their complements, their checksum and its
complement are correct, the program returns TRUE. Important note: Again the
undesirable side-effect may be noticed at this moment. All the RCXs except
the sending RCX will send a reply to the data-transmission, causing IR-noise
to be ignored.
This sounds very difficult and in fact it is, but here
some illustrations:
 |
LASM-code
delt 0
task 0
set 0,21,2,0
Label1002:
chkl 2,1,3,0,21,Label1003
ping
jmpl Label1002
Label1003:
set 33,16,2,3
set 33,17,2,0
set 33,15,2,16
uart 15,1
wait 2,10
---->continue |
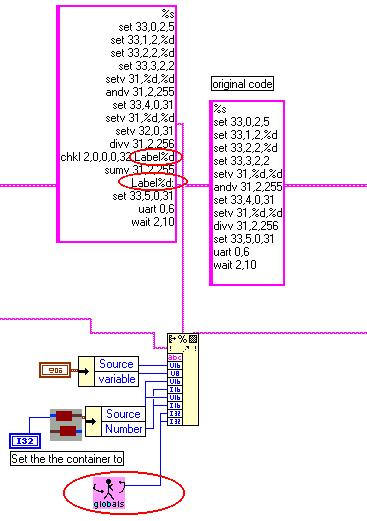
set 33,0,2,5
set 33,1,2,0
set 33,2,2,22
set 33,3,2,2
setv 31,9,0
andv 31,2,255
set 33,4,0,31
setv 31,9,0
divv 31,2,256
set 33,5,0,31
uart 0,6
wait 2,10
endt
plays 5 |
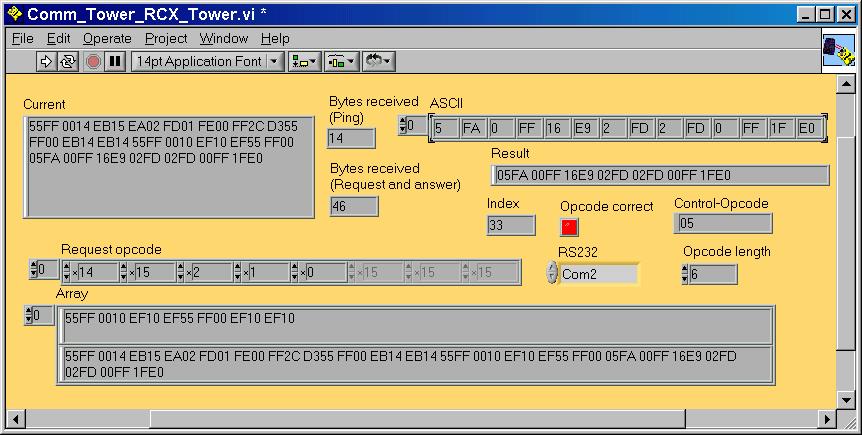
The request-opcode 0x14 (SETVAR) has four parameters:
- 0x15
(= dec21) selects the variable;
- 2 selects the source 2 - constant;
- 1 low-byte of
value;
- 0 high-byte of value.
The upload-opcode 0x05 (SET) to be controlled by
the computer-software has 5 parameters:
- 0 selects the target (0 - variable);
- 0x16 (= dec 22) selects the variable;
- 2 stands for constant-source (don't forget
that the RCX-program reads sensor_1, then stores the value in temporary
variable 31. This value is then considered as a constant in the
SendUARTdata-procedure.)
Note the opcode-header 55 FF 00 and the alternation of
code and complement, finally the checksum and its complement.
Download all the
related files.
21/5/2002 small bug fixed in Comm_Tower_RCX_Tower.vi
3/6/2002
- bug fixed in
fill_remote_container_custom.vi : if the former version is used twice in a
program, you get an error like: only one land per jump
- connectors order changed in
Comm_Tower_RCX_Tower.vi
IMPORTANT NOTE:
The Robolab 2.5 original fill remote
container.vi only works for positive numbers. Negative numbers are NOT
transmitted correctly. We added a custom bug-free version which unfortunately
uses another variable (local 32), and an auto-incrementing label, needed because
of the jump. Here an extract:
 Main Page
Main Page