
Nic_1
created 10/02/2006
last update 29/09/2007 (Daniele's link)
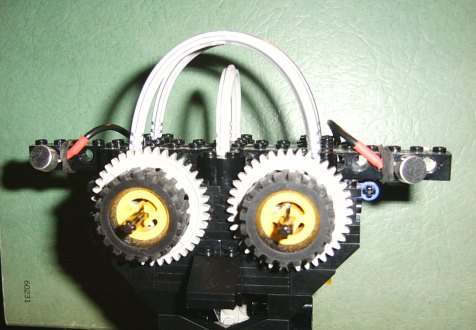
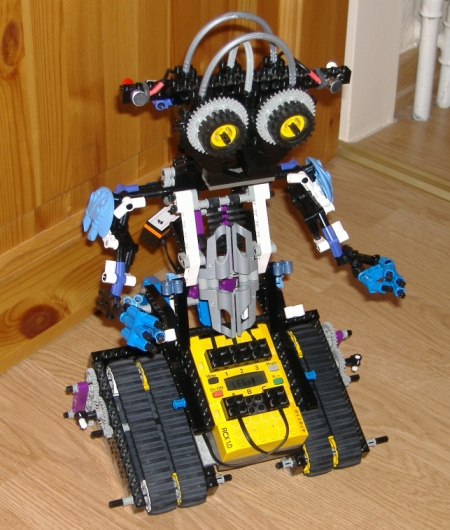
Paul-Nicolas created this nice robot that is capable of following the sound of a radio or a music instrument or a human voice. It uses high speed audio sampling in order to operate the interaural time detection (ITD) that is done through a fast cross-correlation process pruning erroneous results that could have been produced due to room reverberation or detection ambiguity.
Nic_1's design obviously is inspired of http://daniele.benedettelli.com/Johnny5OLD.htm. The robot is quoted at http://superpositioned.com/ .
The robot's behaviour is very impressive !!! See the video (12MB - a bit too dark)
The first edition needed some improvements though. Here the better model:
Some notes:
During the development various data-set sizes were tested. Here a data upload screen shot:

