|
 |
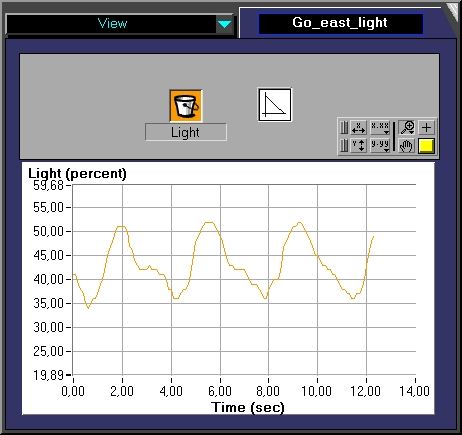
The encoder
LEGO Compass
This project is our answer to the challenge to design a reliable compass only with original LEGO parts except for paper, glue and threads.
Here the result of our investigation:
We use the LEGO magnet from the MARS EXPLORATION set and suspend it in a brick-structure by thin threads. We added a three-color shaft-encoder. The order of the colors makes a distinction between positive and negative rotation.
|
The encoder |
 |
 |
 |
 |
We have placed the compass upon the turnable base which we had previously equipped with the LEGO rotation sensor for experimantal control. For this base have a look at our gyro-pages.
The first tests were made with ROBOLAB. You should have a look at the files there to understand well what's happening.
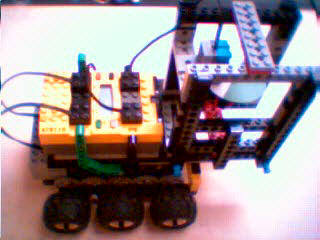
Here the photo of our experimental design. A micro-motor provides the continuous rotation.

We chose a simpler encoder for the LEGO_C_Rover. The compass has been mounted far away from the motors to avoid influences from the motors' magnetic fields. For better weight equilibrium, the RCX has been fixed in a horizontal position.
The RCX is driven by a simple Robolab-program: