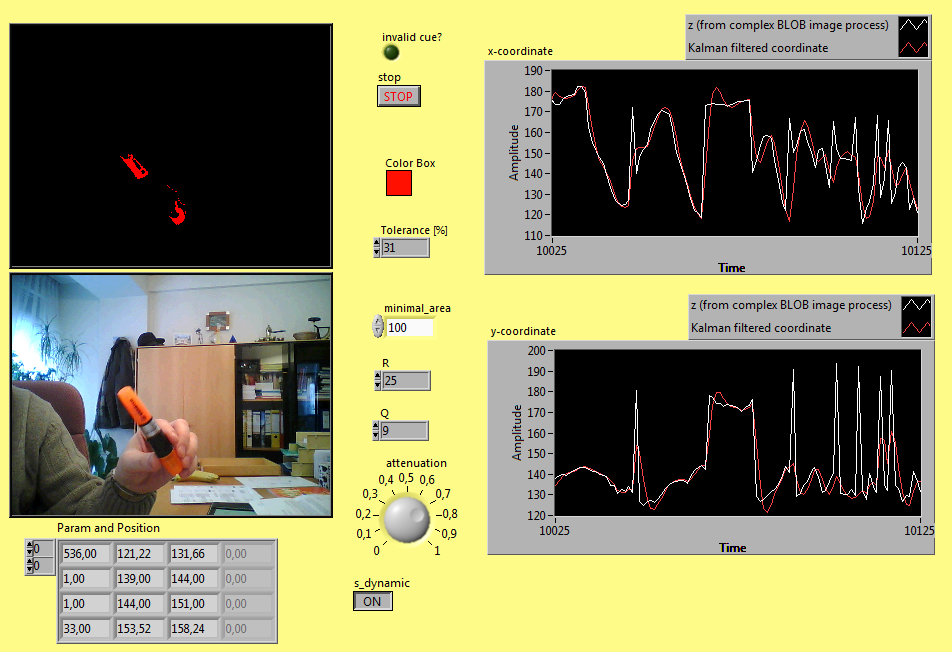
This page is part of the "easy-introduction-to-the-Kalman-filter" series that we started recently on this site. It should be considered as an illustration of what has been explained so far. The main idea is to apply the simplest scalar Kalman to a colour tracking program that runs under ROBOLAB/LabVIEW. For best compatibility we chose ROBOLAB254 version. In order to get an idea of what the filter is capable in the domain of image processing, please consult:
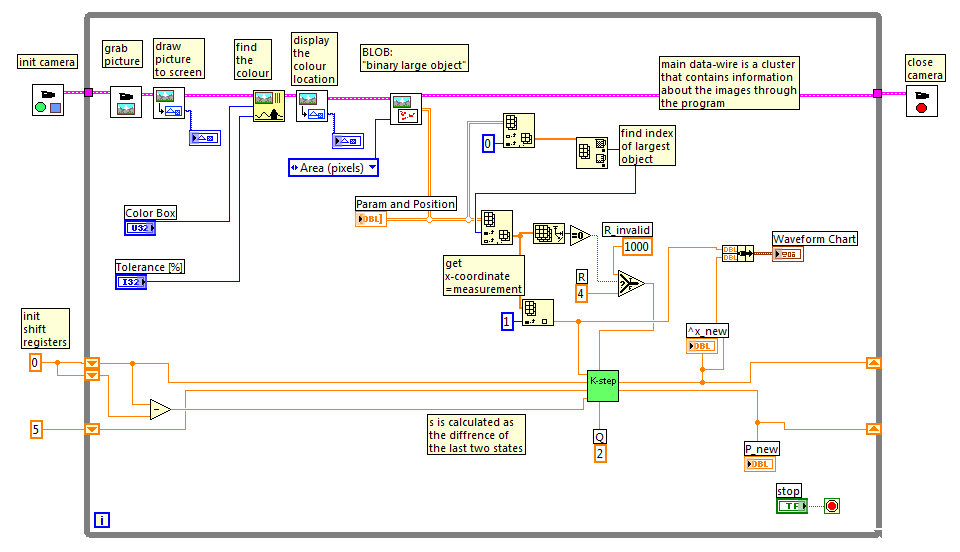
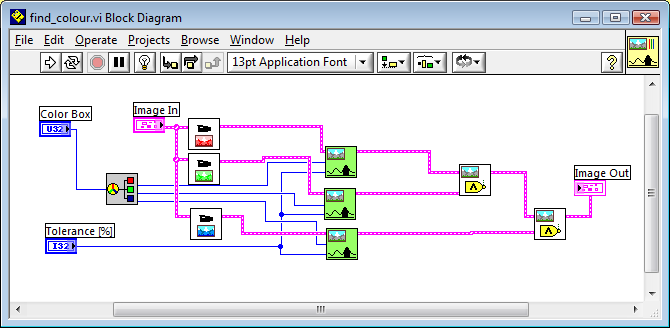
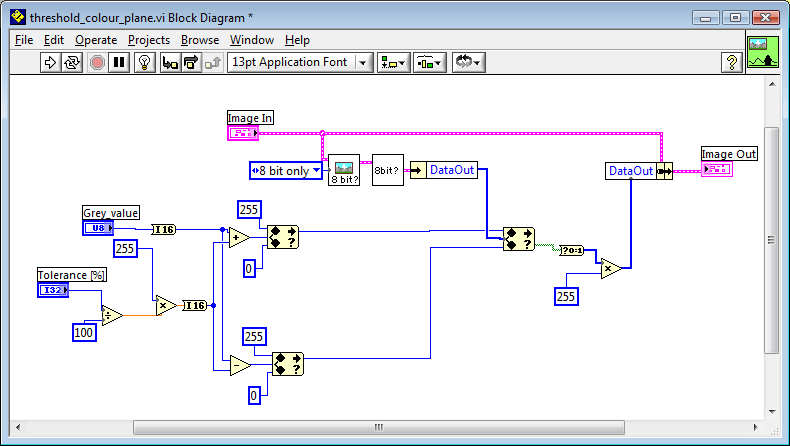
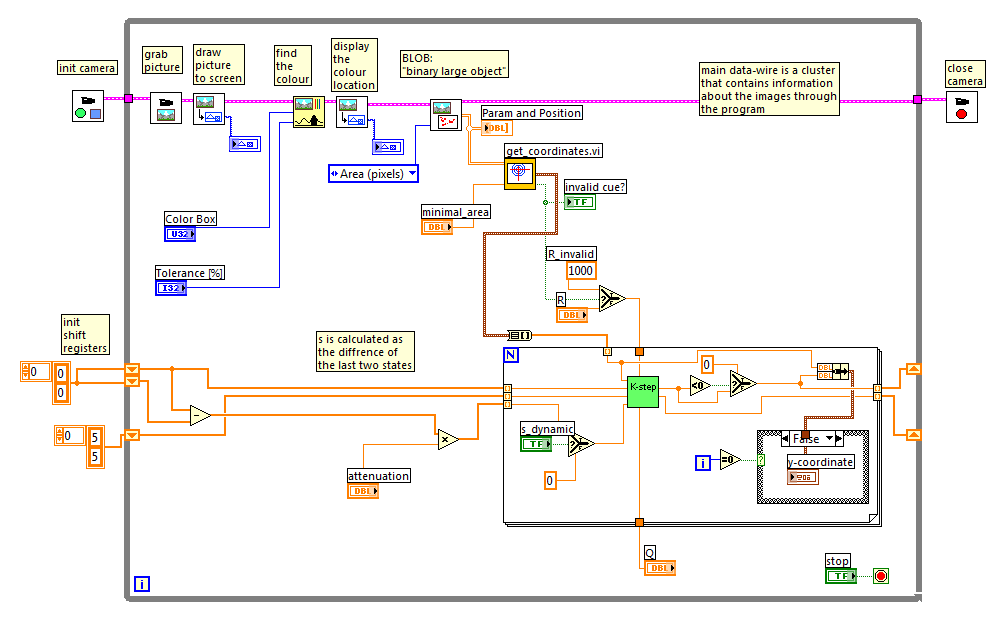
- For those who are not familiar with the ROBOLAB approach to graphics, the program diagram has been well commented and should be self-exlanatory.
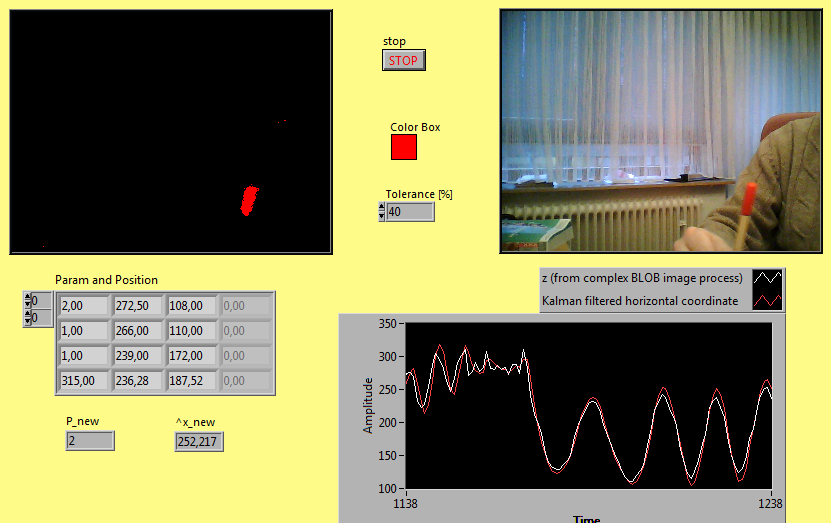
- The program only observes and estimates the x-coordinate. nothing prevents from minimally altering the program to include the y-coordinate. Since both coordinates are independent, the K-step function can be used twice in the same iteration then. Also take notice that the state variable x could represent the vector (x,y)T in that case.
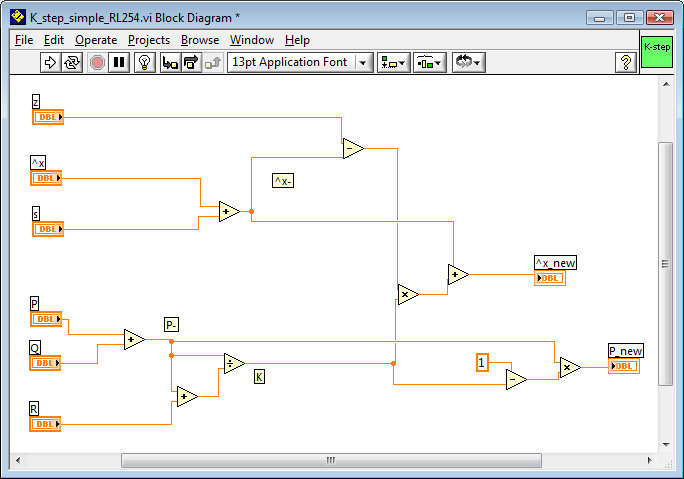
- The prediction model is based on the estimation of the object-speed.
- There is only one simple validitycheck of the measurement. If the BLOB-analyser doesn't find any area, then the measurement variance is switched to 1000. This obviously isn't sufficient for a serious detection of the absence/presence of the tracked object. We could add a certain area threshold and many other image processing configuration. But this is not relevant here for the illustration of the use of the Kalman filter.
- DOWNLOAD VI