Robo-soccer with Robolab 2.5
Make two semi-autonomous LEGO-Mindstorms
robots play soccer in a given field of about 1.20 m x 1.60 m.
A Robo-soccer program should look like this (Soccer5.vi):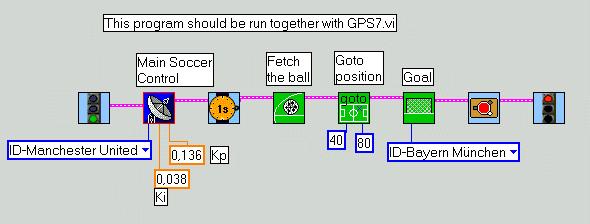
Respect the following procedure:
- the Main Soccer Control MUST be placed immediately
after the start-icon.
- choose your identity (ID_Manchester or ID_Bayern resp.
2 or 3) Note that value 1 (ID_Ball) is reserved for the ball. All other
values incl. zero will produce malfunction
- the robot must be equipped with a rotation-sensor at
port1, a light-sensor at port2 for line-detection. Connect left motor to
port A and right motor to port B. If you have the LEGO remote control,
test the directions. ^ should move the wheels forward.
- place a paper or LEGO-rectangle (marked with a hole) to
the top of your robot.
- adjust the PI-control parameters Kp and Ki according to
your robot
- download your program to the RCX
- set the long tower IR-range
- place the tower that it may communicate with the robot.
- run simultanously GPS7.vi on your computer and the
Soccer-program on the RCX
- be free to change the programs (subroutine 0 is taken,
so do tasks 0..5, be careful with local variables >32, all variables
0..31 are in use!, adding other tasks will affect the PI-controller)
Note the (new) variable use: ALL THE 32 VARIABLES ARE IN
USE !!!!
VARIABLE LIST
| 0 Red |
Index |
| 1 Blue |
X_Ball |
| 2 Yellow |
X_Manchester |
| 3 (user) |
X_Bayern |
| 4 |
Y_Ball |
| 5 |
Y_Manchester |
| 6 |
Y_Bayern |
| 7 |
Current_bearing_Ball (Dummy) |
| 8 |
Current_bearing_Manchester |
| 9 |
Current_bearing_Bayern |
| 10 |
D_X |
| 11 |
D_Y |
| 12 |
temp_index |
| 13 |
motor_power |
| 14 |
Motor_command |
| 15 |
Cruise_command |
| 16 |
Deviation_command |
| 17 |
Bumper_Command |
| 18 |
needed in Atan-function |
| 19 |
idem |
| 20 |
idem |
| 21 |
X_Target |
| 22 |
Y_Target |
| 23 |
HEADING |
| 24 |
DEVIATION |
| 25 |
Target_flag |
| 26 |
temp2 |
| 27 |
temp |
| 28 |
case |
| 29 |
Quadrant |
| 30 |
dx |
| 31 |
dy |
Conclusion:
This way to play robo-soccer has brought a lot of work and
fun to the participating teams. Now they may build best players and easily
program best strategies.
But two major problems remain:
- it takes a lot of patience to calibrate the soccer
control-system through finding the best Kp and Ki values for each robot
- due to battery energy-losses the I-process-part is not
stable and the human controllers must keep on calibrating.
 Main Page
Main Page