
MARS MISSION III
BREAKING NEWS FROM THE SCIENCE
FESTIVAL 2005
31/10/05
| Participation statistics |
Sa 22/10 |
Di 23/10 | Lu 24/10 | Ma 25/10 | Me 26/10 | Je 27/10 | Ve 28/10 | Sa 29/10 | Di 30/10/05 | ||
| File uploads (to local-museum) | 5678 | 8824 | 5280 | 3820 | 3721 | 2246 | 3459 | 7488 | 7128 | 47644 | 78,39% |
| File uploads (to external) | 124 | 3094 | 2154 | 3087 | 2536 | 1479 | 268 | 295 | 101 | 13138 | 21,61% |
| Successful log-ins | 74 | 112 | 29 | 24 | 47 | 38 | 39 | 97 | 70 | 530 | |
| Successful robot-programs | 497 | 578 | 443 | 254 | 218 | 187 | 201 | 426 | 412 | 3216 | |
|
Conclusions: |
1. About 1/5 of the file requests came from outside. | ||||||||||
| 2. The external participants came from foreign countries in the majority of the cases. Identifyable participating countries : | |||||||||||
| Armenia, Australia, Belgium, Czekia, Denmark, France, Germany, Great Britain, Luxembourg, Netherlands, | |||||||||||
| Poland, Spain, Switzeland, Syria, United States of America. Other particpants could not be localized. | |||||||||||
| 3. A single log-in assigns the robot to the remote user for 5 minutes. Thus there has been an effective robot- | |||||||||||
| control for 2650 min = 44h10', which represents a mean of 4.9 hours a day | |||||||||||
| 4. The number of participants actively controlling the robot (530) can be divided into 424 local users and 106 external | |||||||||||
| users =(4:1). The ratio is confirmed by the different IP-addresses. | |||||||||||
| 5. In several e-mails people from outside complained that the rover was constantly occupied. This criticizing especially | |||||||||||
| concerned the weekends during which the robot was run by local users nearly all the time. | |||||||||||
| 6. The foreign participation only happened after the announcement in the LUGNET news-ring. | |||||||||||




28/10/05
27/10/05
26/10/05
25/10/05
24/10/05

23/10/05

Terence, Yves, Thierry, René enjoy.

Paul-Nicolas explains.
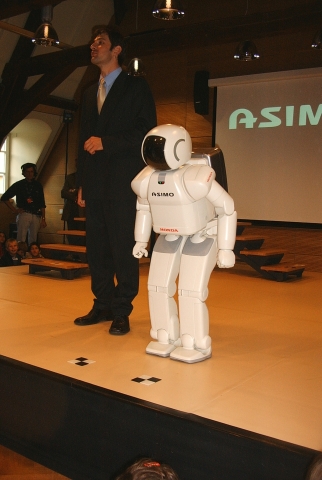
ASIMO searches its reference points.
22/10/05
LINKS: